傾角測量的典型應用
本文旨在探討如何以組合元件一類的加速度計提高傾角測量的精確度。在乘用車上,電動駐車煞車(EPB)被用於使汽車在平坦的分級道路上保持靜止。這是透過用單軸或雙軸加速度計測量傾角來實現的。一般做法是將一個X軸/Y軸或Z軸低g加速度計裝在EPB控制單元中一個專門的模組中。現在,越來越多的汽車配備ESC(電子穩定控制)功能,在單一晶片中整合了組合式低g加速度計和陀螺儀。這樣做是為了防止汽車側滑和翻車;如今,ESC功能已成為世界各國或地區法律的強制要求。如果透過組合元件(單晶片、組合式加速度計和陀螺儀)來實現傾角測量,則不必在車上安裝一個獨立的EPB模組,結果可以大幅降低汽車的成本。由於組合元件通常用於ESC,所以並未針對傾角偵測最佳化,並且透過組合元件測量傾角時,測量精度有時無法達到要求。由於組合元件是XY軸或XYZ軸,所以通常用X軸進行傾角測量,EPB模組中的部分傳統型低-g加速度計使用的是Z軸,因為它是垂直安裝在引擎室裡的。檢測軸應該與重力垂直,才能取得更高的精度——我們稍後會討論這一點。
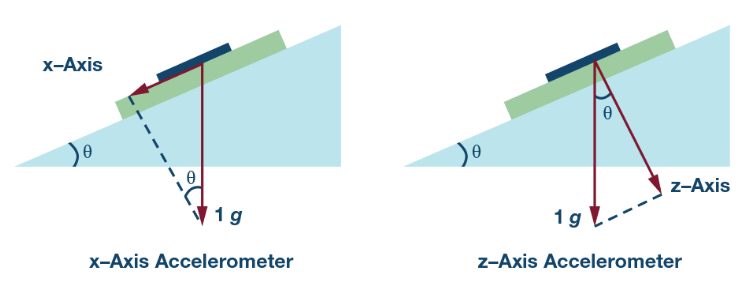
圖1. X軸和Z軸加速度計的安裝示意圖。
對於汽車中的傾角測量,評估精度是非常重要的。不妨想像,您的車停在絕對平坦的地面,因此,加速度計計算的傾斜角度應該是0°。如果您的車停在斜坡上,就應該精確地偵測出傾角,以便正確地啟動煞車系統。

圖2. X軸檢測傾角測量示意圖。

因此

其中:
A OUT 為加速度計的輸出,單位為g。
θ 為斜坡的傾角,單位為度。
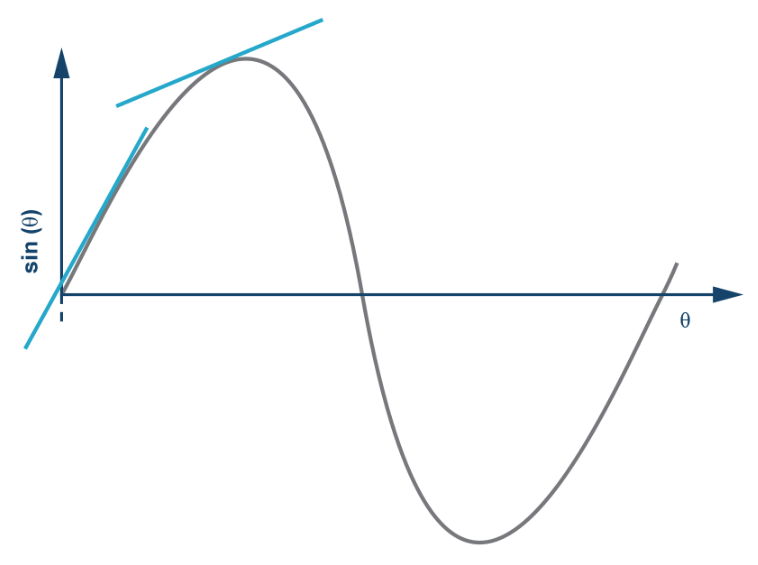
圖3. sin θ對θ隨θ增加而下降的靈敏度。
由於sin θ是一個非線性函數,所以,A OUT與θ之間的關係是非線性的,在接近零時其線性度處於最佳狀態,即此時具有優質的測量精度。隨著θ的增大,測量精度下降。這正是偵測軸應與重力垂直的原因,因為道路坡度將接近零
對於汽車傾角測量,不必在全斜坡坡度的條件下考慮系統。現實世界中,道路上的絕大多數斜坡坡度不會超過30°。我們只需要分析在±30°的範圍內分析貢獻因素的精確度即可。
影響系統層級測量精度的貢獻因素有多個:
-
靈敏度誤差與初始絕對失調
-
非線性度
-
與初始絕對失調的總失調變化
-
噪音
靈敏度誤差與初始絕對失調
靈敏度誤差
靈敏度是對輸入-輸出測得的傳遞函數的斜率,通常為+1 g和–1 g。靈敏度誤差為元件間的靈敏度偏差。例如,有些加速度計的最大靈敏度為3%。
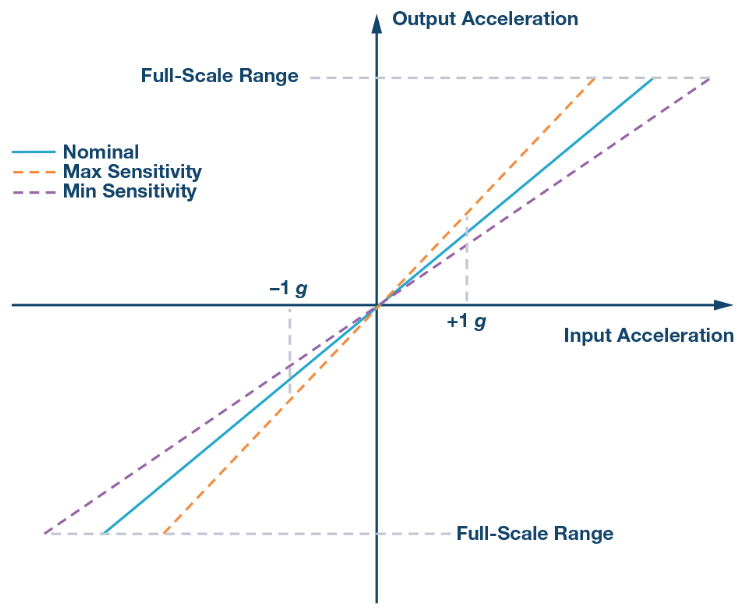
圖4. 輸入-輸出加速度靈敏度誤差。
初始絕對失調
範圍內的失調約為25°C;例如,在模組製造完成後立即測量的值為25°C ± 5°C。初始絕對失調表示大量裝置的實測偏移值的標準差。
兩點校準
對於傾角測量應用,兩個主要的誤差來自失調誤差和靈敏度誤差。這兩種誤差會導致不可接受的檢測結果,因此不得忽略。如果我們希望消除這些部分誤差,則應對加速度輸出進行校準。一般地,要對傾角測量的失調和靈敏度進行一次校準。若要考慮失調與靈敏度誤差,加速度計輸入與輸出的關係為:

其中:
A輸出 為失調誤差,單位為g。
增益為加速度計的增益,理想值為1。
A實際為施加於加速度計的實際加速度,單位為g。
有兩種基本校準技術;其中一種是單點校準。這種校準的具體做法是在加速度計上施加一個0 g場,然後測量輸出。這類校準只能用於校準失調誤差,無法校準增益誤差。然後,從實際輸出值中減去0 g場的輸出結果,消除失調誤差。這種校準方法非常簡單,但精度不足,因為仍然存在靈敏度誤差。另一種方法是1 g翻轉校準,在+1 g和–1 g時採用兩點校準,並在每個+1 g和–1 g場內按照以下公式測量加速度輸出:

其中,失調A失調的單位為g。
以這兩點資訊為基礎,可以依照以下方法解出失調和增益:

其中,+1 g和1 g測量值、A +1 g和A –1 g均以g為單位。
經過這次校準以後,可以用該等式計算實際加速度,每次都會消除失調誤差和靈敏度誤差。

其中,A失調和A輸出以g為單位。
非線性度
元件的非線性度為測得加速度(A MEA )與理想線性輸出加速度(A FIT )之間的最大偏差。加速度測量資料集應包括加速度計的滿量程範圍。其測量方式為Max (| A MEA – A FIT |)。

圖5. 裝置非線性度。
其中:
A MEA為給定g n下的測得加速度。
A FIT 為給定g n下的預測加速度。
多數加速度計或組合元件在給定輸入加速度計範圍內均存在非線性-例如,30 m g ± 2 g的範圍。對於傾角測量應用,輸入坡道斜率在±30°以內,這表示輸出加速度範圍在±500 m g (±1 g × sin 30°)以內,所以應重新評估該範圍內的非線性度。由於非線性度在整個輸入範圍內是非線性的,所以,很難準確地量化評估這部分誤差。然而,由於該裝置的數據手冊通常都很保守,線性度為30 m g,輸入範圍為±2 g,用10 m g計算±500 m g範圍內的誤差更合理些。
與初始絕對失調的總失調變化
與初始絕對失調的總失調變化為溫度、應力和老化效應導致的失調的最大偏差。此偏差是相對於給定裝置的初始絕對失調進行測量的。這是精度總誤差的主要貢獻因素。
在溫度、應力、老化等所有這些因素中,變化與溫度在總失調變化中佔比很大。一般地,變化與溫度曲線是二階曲線,通常為旋轉拋物線。為了消除這部分誤差,可以在系統層級執行三點校準。對於給定元件,可按下列步驟校準輸出失調隨溫度的變化值。
第1步:
使裝置的輸出響應以某個 ∆N 0值偏移。溫度校準流程的第一步是消除環境溫度下的失調。

圖6. 第1步:消除環境溫度下的失調。
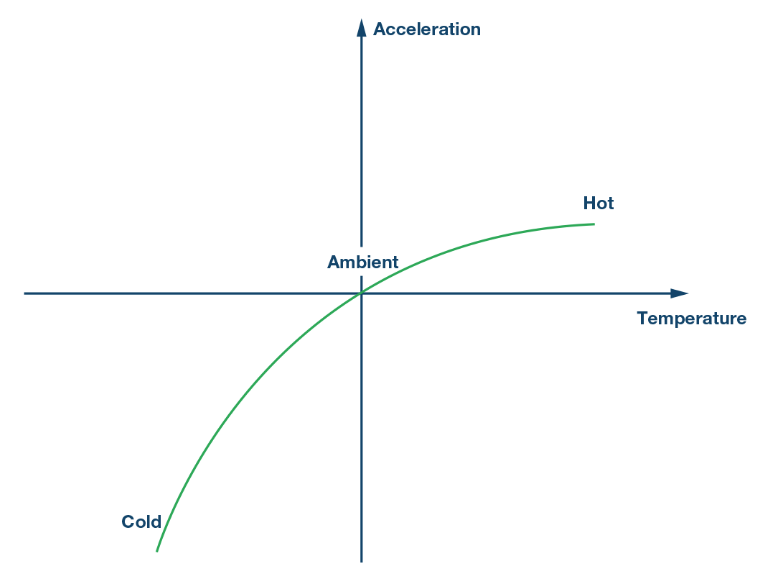
圖7. 第2步:在消除環境溫度下的失調之後。
第2步:
接下來,在高溫下測試器件,用獲得的新資訊產生失調校正線性公式。
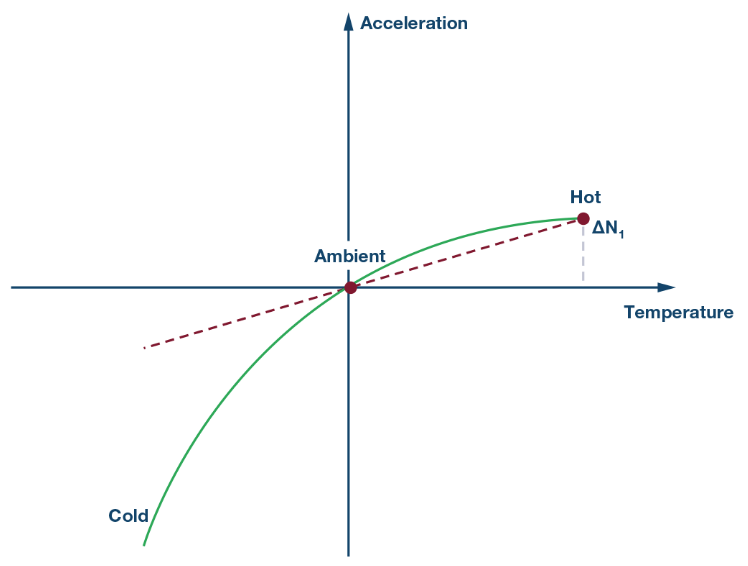
圖8. 步驟3:消除高溫下的拋物線旋轉分量。
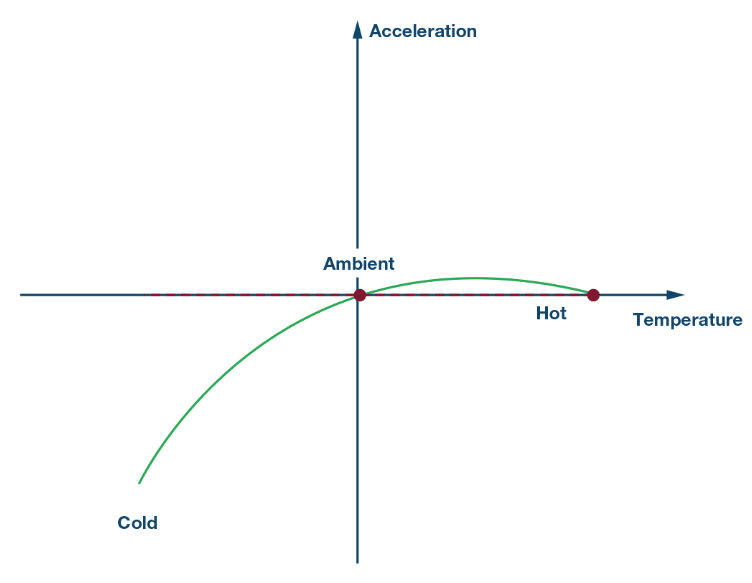
圖9. 第4步:在消除高溫下的拋物線旋轉分量之後。
第3步:
為現有公式增加一個二階分量,校正失調剩餘部分。設二階曲線遵循以下公式:

這是二階拋物線公式,已經通過第1步和第2步消除了旋轉分量。
在這個公式中,此二階拋物線有三個解:

然後,我們可以得到溫度係數a, b, c .
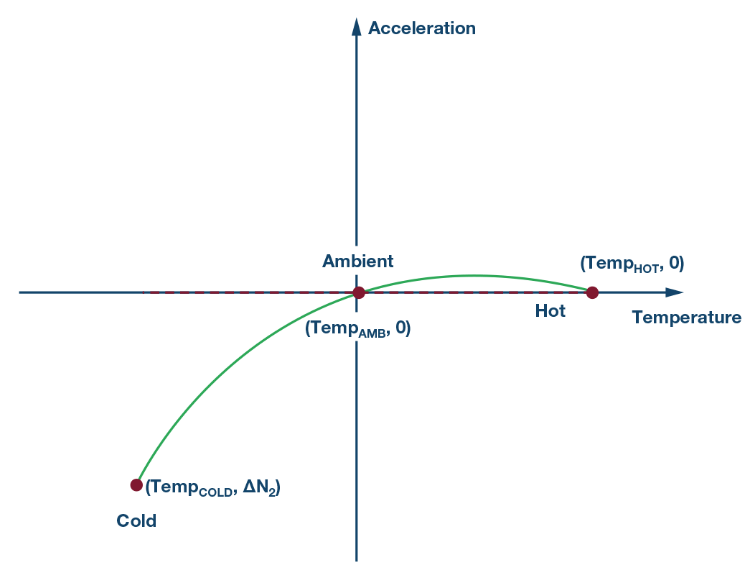
圖10. 第5步:增加二階分量,消除剩餘失調。
有關∆N 0 , ∆N 1 , ∆N 2 , a, b, c的所有溫度係數資訊應該儲存在系統非揮發性記憶體中,同時需要一個板載溫度感測器。系統會在每次上電後例行校正加速度計,確保消除失調隨溫度的變化值。
噪音
基於單一資料樣本測量傾角不一定可靠。即使加速度計的噪音為零,傾角測量也是在汽車啟動時測量的,所以,需要減小引擎、過往車輛或乘客在車上來回移動導致的任何振動。最好的方法是在不降至最低資料速率要求的條件下,在盡量長的時間內做資料平均。數據平均演算法會減少rms雜訊。
假如我們對雜訊取樣,結果可得到每個樣本的方差

求一個隨機變數的平均值,得到以下方差,

由於雜訊方差保持於σ 2不變,

以上推導顯示,相同未校正雜訊的n次實現求平均值可使雜訊功率減少n倍,並使rms雜訊減少√n。
由於隨機雜訊受高斯分佈影響,所以,rms雜訊等於高斯分佈的標準差。6σ以內的最小分佈為97%。
例如,如果以1 kSPS的取樣率對每100 ms的資料求平均值,則最大rms雜訊= 0.4 m g,即是說如果以6σ作為與平均值的距離,則此時的峰值雜訊僅為2.4 m g。
用於與rms值相乘的因數取決於裝置要執行的任務的統計需求。例如,如果選擇6作為因數(峰值雜訊為6 × RMS_Noise),則演算法在裝置生命週期內要運行的次數會影響超過最差情況6 × RMS_Noise 的機率。可總結如下:

E為在生命週期內超過最差情況的預期次數,M為生命週期內的運行次數,r為超過最差情況的機率。基於此,我們可以透過乘以rms雜訊來評估出一個合理的因數。
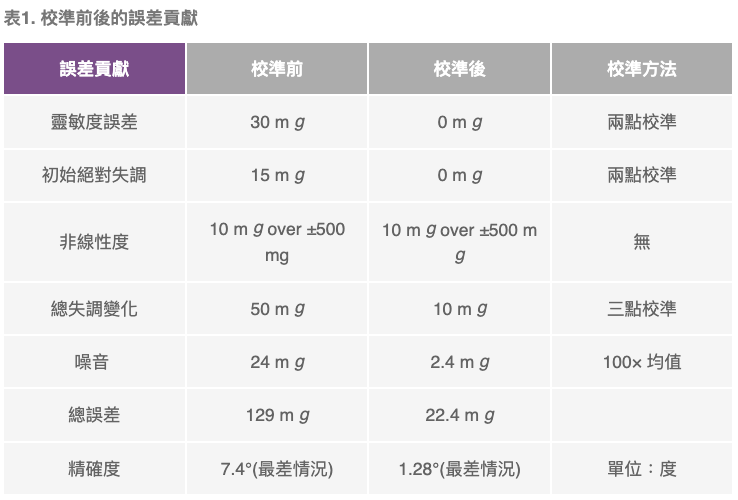
小結
以ADI公司的ADXC1500 / ADXC1501(組合式陀螺儀和2軸/3軸加速度計)為例,所有誤差貢獻項均列於表1中,包括校正和不校準兩種情況。我們可以假設,總失調變化為二次曲線,且其在溫度範圍內的變化佔總失調變化的80%。另外,以6為因數乘以最大rms雜訊。
一個陀螺儀和一個三軸加速度計的單晶片整合方案可以實現多種新型應用,尤其是在汽車安全系統和工業自動化應用領域。為了設計更可靠、高精準度的汽車安全系統,例如,穩定的電子控制系統(ESC)和側翻偵測系統,盡量減少系統誤差至關重要。汽車中已安裝這些傳統型底盤控制系統,包括防鎖死煞車系統、牽引控制和偏航控制系統。
致謝
藉此機會向我的兩位同事Matthew Hazel和Brian Larivee致謝,感謝他們在我撰寫本文的過程中為我提供了許多啟發。
作者

聯繫我們
ADI 所有產品請洽【 安馳科技 】
安馳科技|ADI亞德諾半導體網站:https://anstekadi.com
安馳科技 LINE 官方帳號:https://lin.ee/5gcKNi7
安馳科技 Facebook 官方帳號:https://www.facebook.com/ANStek3528
安馳科技EDM訂閱 https://anstekadi.com/Home/EDM
申請樣品與技術支援:https://www.surveycake.com/s/dQ3Y2
與我聯絡:Marketing.anstek@macnica.com