下載看更多 ▶︎ ADI RF 與 AMD FPGA 完美結合,助力UAV飛得更高!

摘要
本文重點介紹了慣性測量單元 (IMU) 感測器在機器人技術中定位的重要性,並概述了其主要優勢。IMU 通過提供關鍵的運動數據,已成為機器人精確定位不可或缺的一部分。它們集成了加速度計、陀螺儀和磁力計,使機器人能夠通過提供即時回應來準確確定其方向、位置和運動,從而使它們能夠在動態變化的環境中導航。感測器融合技術將 IMU 數據與其他感測器(如攝像頭或 LIDAR)相結合,通過整合多個數據源來提高定位精度。IMU 廣泛應用於行動機器人、人形機器人、無人機 (UAV) 和虛擬/增強現實。它們在實現精確定位方面的作用使機器人能夠自主執行複雜的任務並與周圍環境進行有效交互。本文探討了 IMU 在 AMR 運行的挑戰性環境中的使用案例,以及 IMU 如何在實現精確定位方面發揮關鍵作用。
介紹
自主移動機器人 (AMR) 對於未來的智慧工廠和倉儲至關重要,在塑造未來自動化、可持續和更清潔的工廠方面發揮著關鍵作用。AMR 可提高效率、減少浪費並優化工業環境中的利用率。雖然未來的工廠可能是專門為AMR運行而建造和優化的,但使這些機器人適應現有的倉庫和工廠會帶來挑戰。AMR 的主要障礙涉及兩個關鍵組成部分:高效的路徑規劃(確定最佳路徑)和精確定位(不斷更新其在其環境中的位置)。1。
本文重點介紹 GPS 拒絕的封閉環境中的室內導航。AMR 利用一系列感測器和演算法進行定位和導航。這些感測器包括攝像頭、LIDAR 和雷達等視覺感測器,以及車輪編碼器和 IMU 等里程計感測器。每種感測器模式在範圍、精度和感測資訊方面都有其獨特的優勢。這些感測器的組合確保了在動態環境中有效定位機器人的全面數據。雖然一系列感測器是實現完全自動駕駛的必要條件,但本文重點介紹了AMR運行的用例和具有挑戰性的環境,以及IMU如何幫助精確定位,這對於導航和自主性至關重要。
什麼是 IMU?
IMU 是由微機電系統 (MEMS) 設備製成的微型設備。它們通常由以下元素組成:
-
三軸加速度計:加速度計測量相對於地球引力場的加速度。在IMU中,三軸加速度計用於測量 x、y 和 z 軸(見圖 1)。

圖 1.x 軸、 y 軸和 z 軸上的加速度測量。
-
三軸陀螺儀:陀螺儀測量旋轉速率,在三個軸中的每個軸上提供角速度。三軸陀螺儀可以測量機器人沿 x、y 和 z 軸的角速度(ωx、ωy、ωz)(見圖 2)。

圖 2.x、y 和 z 軸上的陀螺儀測量。
-
高性能磁力計:它提供磁場測量,這對於在具有挑戰性的環境中進行準確的方向估計至關重要。雖然不受歡迎,但一些傳統IMU中提供了磁力計。
-
其他:用於補償溫度變化的溫度感測器和用於測量壓力的氣壓計。
IMU 功能框圖
-
典型的 IMU 不僅包括陀螺儀、加速度計和溫度感測器,還包括模數轉換,以提取測量值和溫度補償(見圖 3)。

圖 3.IMU 的典型功能模組。
-
IMU 具有板載初步濾波演算法,例如板載 FIR(有限脈衝回應)。
-
校準和補償可糾正任何未對準或感測器偏差。
-
在傳輸最終數據之前,使用者可以選擇從 IMU 模組內軸旋轉 (dƟ) 以匹配機器人的參考系。
下載看更多 ▶︎ ADI RF 與 AMD FPGA 完美結合,助力UAV飛得更高!
為什麼 IMU 對 AMR 有益?
-
高更新率的即時定位:自主性和實時導航是機器人作環境中的關鍵要素。然而,感知感測器通常以有限的更新速率運行,範圍從大約 10 Hz 到 30 Hz。相比之下,IMU 能夠提供高達 200 Hz 的高保真位置輸出。這種更高的更新率顯著提高了系統的可靠性,使其能夠快速適應動態環境中方向的快速變化,從而促進及時回應。加速的更新速率還使AMR能夠在其他測量之間的短暫間隔內提供估計的姿態。因此,IMU 在實現即時定位方面發揮著關鍵作用,超越了更新速率快 10× 的感知感測器。
-
航位推算:IMU 是航位推算的支柱,航位推算是一種根據先前已知位置估計當前位置的導航技術。IMU 不斷提供有關位置、方向和速度的數據,能夠實現精確估計,有助於AMR的可靠導航。
-
緊湊的尺寸和重量:IMU 的緊湊尺寸和輕巧的設計使其成為集成到各種移動機器人配置中的理想選擇。例如,Analog Devices ADIS16500 的佔地面積僅為 33.25 mm × 30.75 mm,可確保在不影響機器人可作性的情況下實現高效放置。
-
在不同環境中的穩健性:IMU 對電磁干擾的抵抗力相對較強,可以在各種環境中運行,包括室外和室內環境。這使得它們適用於廣泛的應用。
-
通過加速更新速率增強可靠性:由於感知感測器的更新速率通常限製為 ~10 Hz 至 30 Hz,因此 IMU 透過提供高達 4 kHz 原始數據的高保真位置輸出而脫穎而出。這種增加的更新速率增強了可靠性,尤其是在動態環境中,使AMR能夠快速回應,並説明在兩次其他測量之間的短時間內估計姿態。
儘管有視覺感測器,為什麼IMU對AMR至關重要
如圖 4 所示,AMR 通常具有各種視覺感測器,例如飛行時間 (ToF)、攝像頭、LIDAR 等。儘管視覺里程計提供了豐富的數據集,但IMU的必要性仍然存在。以下方案探討了一些原因:

圖 4.AMR 的感測器堆疊。
-
AMR 在特徵稀疏走廊中導航:同步定位和地圖構建 (SLAM) 演算法基本上是通過匹配觀察到的感測器數據來運行的,這些數據存儲在地圖中以在地圖內進行定位。當AMR穿過長走廊時(見圖 5),它必然會很快失去位置。由於缺乏具有均勻顏色、紋理或反射率的直壁等獨特特徵,SLAM 難以精確定位。在這種情況下,IMU 通過提供航向和方向資訊來充當有價值的引導系統。
 圖 5.AMR 在毫無特色的走廊中失去了視覺里程計。
圖 5.AMR 在毫無特色的走廊中失去了視覺里程計。
-
在廣闊的開放環境中導航:範圍限制:在大型開放空間(例如 50 m × 50 m)中運行時,AMR 難以定位,因為獨特功能超出了感測器範圍(鐳射雷達的最大範圍通常約為 10 m 至 15 m)。如圖 6 所示,由於空間過大,AMR 的里程計已經丟失。此外,倉庫通常表現出統一的特徵,因此難以使用視覺感測器。在這種情況下,IMU 和車輪編碼器是精確本地定位的唯一可靠來源。
 圖 6.感測器的視野 (FoV) 有限,AMR 無法在大型開放空間中進行定位。
圖 6.感測器的視野 (FoV) 有限,AMR 無法在大型開放空間中進行定位。
-
在斜坡上導航:在斜坡上機動時,傳統的SLAM 演算法在依賴 LIDAR 時遇到了挑戰,因為 2D 點數據不顯示梯度資訊。因此,斜坡被誤解為牆壁或障礙物,從而導致地圖成本更高。因此,使用 2D 系統的傳統 SLAM 方法在斜坡上變得無效。IMU 通過提取梯度資訊(圖 7)來有效地協商斜坡上的導航,從而幫助解決這一挑戰。
 圖 7.AMR 在斜坡上移動。
圖 7.AMR 在斜坡上移動。
-
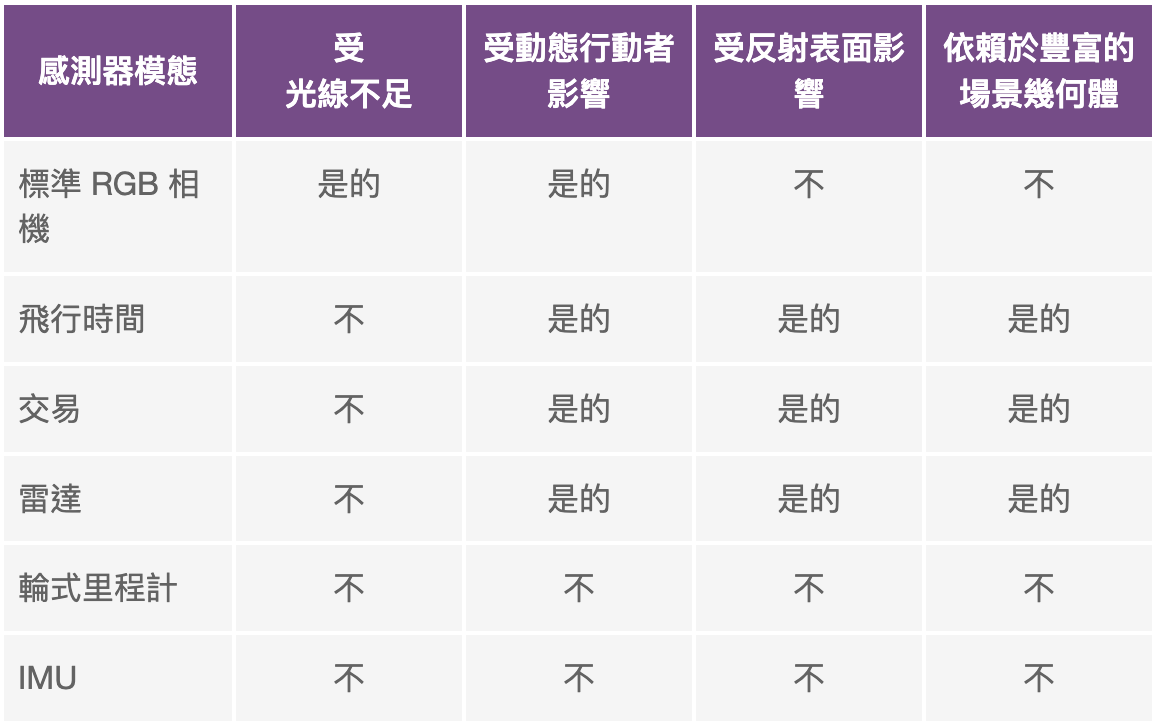
導航時的環境因素: 對環境因素的敏感性: LIDAR 感測器對各種環境因素很敏感,例如環境光、灰塵、霧和雨。這些因素會降低感測器數據的品質,進而影響 SLAM 演算法的性能。同樣,其他感測器模式確實會受到反射表面和動態移動物體(其他AMR或工作人員)的影響,從而進一步混淆 SLAM。表 1 總結了環境如何影響不同的感測器模式。IMU 可以在各種環境中可靠運行,使其成為行動機器人的多功能選擇。
下載看更多 ▶︎ ADI RF 與 AMD FPGA 完美結合,助力UAV飛得更高!
表 1.估計各種感測器模態的姿態和方向以進行定位
然而,沒有感測器是完美的!
雖然 IMU 有好處,但也存在風險,並且會帶來挑戰2:
-
雜訊:IMU 測量會受到雜訊的影響,這會降低機器人導航和控制的準確性。為了補償雜訊,IMU 通常採用先進的濾波技術,例如卡爾曼濾波或 FIR。
-
偏差:IMU 感測器會隨著時間的推移累積偏差,這可能導致方向和運動估計誤差。為了解決這個問題,使用偏置估計演算法來持續更新 IMU 感測器讀數。
-
非線性:IMU 感測器表現出非線性行為,這可能會使數據處理和解釋進一步複雜化。為了補償非線性,需要對它們進行校準,以表徵感測器的行為並應用適當的校正。
-
隨機遊走:IMU 容易受到外部熱機械事件的影響,導致ARW(角度隨機遊走(在陀螺儀中)和VRW(速度隨機遊走(在加速度計中))出現誤差。
我們如何降低這些風險?答案是感測器融合!
-
感測器融合如何提供説明?
-
提高可靠性。
-
提高數據品質。
-
更好地估計未測量的狀態。
-
增加覆蓋範圍,從而確保安全。
-
-
感測器融合演算法的意義:
-
擴展卡爾曼濾波等狀態估計技術可以糾正常規AMR工作期間的雜訊、ARW和偏置不穩定誤差。
-
通過測量地球引力引起的加速度,可以在IMU中消除俯仰和滾動陀螺儀誤差。
-
該演算法跟蹤並校正偏置漂移並校正ARW誤差。
-
-
擴展卡爾曼濾波器 (EKF):
-
支援對過去、現在和未來狀態的估計,即使建模系統的確切性質未知。圖 8 顯示了一種簡化的 EKF 演算法。
-
隨時間觀察包含高斯白雜訊或其他不準確的測量值,並通過以下方式估計測量值的真實值
-
同步感測器之間的測量
-
預測位姿和誤差估計
-
估計和更新預測值的不確定性
-
-

圖 8.EKF 演算法(簡化)。
-
感測器融合:
-
在典型的基於機器人作系統 (ROS) 的系統中,視覺感測器以及 IMU 和車輪里程計(圖 9)使用一種流行的基於 ROS 的開源軟體包(稱為 robot_localization)進行融合,該軟體包以 EKF 演算法為核心。該軟體包支援無限數量的感測器和各種感測器輸入(如 IMU、車輪速度和里程計)的融合。robot_localization 給出的姿態輸出包括機器人位置和方向的 3D 估計值,以及線性/角速度和加速度,這些都提供給 SLAM 演算法。姿勢輸出表示為:
姿勢狀態 = (X, Y, Z, 橫滾, 俯仰, 偏航, X ̇, Y ̇ , Z ̇, 滾動 ̇, 俯仰 ̇, 偏航 ̇, X ̈, Y ̈, Z ̈)。
-

圖 9.使用 ROS 的典型感測器融合系統。
使用 ADI IMU 如何幫助解決這些挑戰?
Analog Devices 為包括行動機器人在內的各種應用提供多種 IMU。提供的獨特價值主張如下所示:
-
內置校準:ADI IMU 具有完全工廠校準的加速度計和陀螺儀尋址參數,例如靈敏度、偏置、對準、線性加速度陀螺儀偏置和加速度計。內置的動態偏移校正可補償電源電壓、溫度和磁干擾的變化,並具有降噪功能。4這大大減少了系統集成時間和採集成本,簡化了在各種條件下的工業應用中精確感測器測量的整體實施。
-
低雜訊、高頻寬模數轉換器 (ADC):以高精度和高頻寬捕獲感測器數據,確保可靠和回應迅速的運行。
-
高精度:ADI IMU 提供精確的方向、運動和速度測量,使機器人能夠做出明智的決策並精確導航周圍環境。
-
低功耗:移動機器人通常使用電池供電,因此低功耗對於擴展其工作範圍至關重要。ADI IMU 效率高,可最大限度地降低功耗並最大限度地延長電池壽命。
-
緊湊的尺寸:為了適應移動機器人的有限空間限制,ADI IMU 採用緊湊的外形設計。這允許輕鬆集成到各種機器人配置中,而不會影響性能。
-
易於集成: 與機器人的控制系統輕鬆集成對於無縫運行至關重要。ADI 的 IMU 測試板與開源 ROS 節點相結合,可輕鬆集成以構建 AMR。
結論
IMU 是AMR定位的必備工具,因為它們提供方向估計和運動跟蹤,並提供具有高更新率的即時回應,允許AMR在動態環境中導航。感測器融合技術(如卡爾曼濾波器)允許其他感測器模態的組合來補償彼此的局限性。ADI 提供廣泛的 IMU,以滿足各種行動機器人應用的特定要求。
參考
1 Shoudong Huang 和 Gamini Dissanayake。 「機器人定位:簡介。」 John Wiley & Sons, Inc.,2016 年 8 月。
2奧利佛·J·伍德曼。 “慣性導航簡介。」劍橋大學,2007 年 8 月。
3 robot_localization 2.6.12 文件。湯姆摩爾,2016 年。
4蘭迪·卡弗和馬克·魯尼。 “ MEMS加速度計校準可優化工業應用的精度。」EE Times,2007 年 10 月。
作者

薩爾維什·皮姆帕爾卡
Sarvesh Pimpalkar 是 Analog Devices 工業邊緣、運動控制和機器人團隊的一名系統應用工程師,主要負責行動機器人。他的專業領域是Linux和嵌入式系統的軟體系統設計和產品開發。他擁有都柏林城市大學電子和計算機工程碩士學位、班加羅爾 IIM 青年領袖執行綜合管理證書課程和孟買大學電子工程學士學位。在加入 Analog Devices 之前,Sarvesh 曾擔任設計工程師,為各種工業產品開發硬體、固件和自動化。
安馳科技 FAE support. Please e-mail
► Marketing.anstek@macnica.com
► 或加 安馳科技 LINE 洽詢
► 追蹤 安馳科技 Facebook
► 請加入 安馳YouTube頻道
► 立即填寫料號 申請樣品
洽詢更新產品、技術與安馳抽獎活動