運動控制是對位置、速度和加速度的控制,可實現當今高度自動化的物理世界。每當物體需要在正確的時間出現在正確的位置時,就需要運動控制。由於真實物體正在移動,運動控制技術比大多數其他學科更需要精確度和可靠性。ADI Trinamic 運動控制技術提供高精度、高可靠性解決方案來支援這些獨特的需求。
 沉默的。聰明的
沉默的。聰明的
最先進、最安靜的 3D 列印機製造商依賴 ADI Trinamic 技術的卓越電流控制。
精確的。可靠的。
自動化需要可重複且可靠的定位。ADI Trinamic 技術利用了數十年來高品質運動控制輸出的傳統。
高效的。有反應。
動態馬達對快速電流控制有著最高的要求。透過專用伺服控制器,ADI Trinamic 技術使高階控制易於實施且易於使用。
 光滑的。可信。
光滑的。可信。
當馬達成為人體的一部分時,它必須像肌肉一樣平滑可靠。ADI Trinamic 技術有助於減少不平等並提高基本醫療設備的效能。
 靈活的。耐用的。
靈活的。耐用的。
自動化內部物流和機器人技術需要耐用且可靠的運動和馬達控制。ADI Trinamic 解決方案經過數十年的考驗,效果良好。
利用 ADI Trinamic 技術提升性能
ADI Trinamic 斜坡產生器透過處理純運動控製本身來減輕 MCU 的負擔。透過調節電動馬達及其負載等致動器的位置、速度和加速度,ADI Trinamic 運動控制技術可透過斜坡曲線優化運動控制,為您的運動控制需求提供最佳性能,甚至對於移動多個同步軸的嚴苛應用也是如此。
為什麼要使用斜坡曲線?
 驅動負載最簡單的方法是使用恆定速度。由於這種速度模式沒有定義的加速階段,因此對於立即恆定速度來說,理論加速度值是無限的。然而,系統和負載都具有時間有限的行為,必須加速到所需的速度。因此,根據系統和負載的不同,加速時間延遲不穩定。
驅動負載最簡單的方法是使用恆定速度。由於這種速度模式沒有定義的加速階段,因此對於立即恆定速度來說,理論加速度值是無限的。然而,系統和負載都具有時間有限的行為,必須加速到所需的速度。因此,根據系統和負載的不同,加速時間延遲不穩定。
由於速度和距離之間的關係,如果不進一步調整,就不可能實現精確定位。更重要的是,如果目標速度與實際系統速度之間的差異太大,馬達可能會停轉或超調。
斜坡曲線解釋了理論速度斜坡和真實物理世界之間的差異。ADI Trinamic 運動控制技術提供各種斜坡曲線,從梯形到 S 形斜坡,用於處理貴重液體。斜坡嵌入在我們的運動控制週邊中,以減輕處理器的負擔,同時提供一流的性能。
梯形坡走
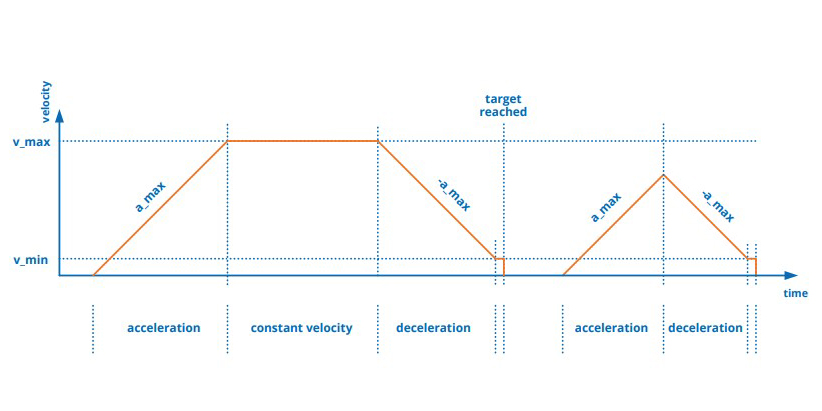
梯形斜坡透過使用恆定梯度來預測加速度。這導致系統速度線性增加和減少,其中一種恆定梯度率用於加速(aMAX),一種恆定梯度率用於減速(dMAX)至最大速度(vMAX)。透過這個恆定的梯度,可以精確計算並考慮不恆定的時間延遲。對於絕大多數定位應用,線性斜坡輪廓就足夠了。具有線性斜坡功能的 ADI Trinamic 運動控制器可實現一根或多根軸的快速準確定位,從而減輕 MCU 要求嚴格的即時任務的負擔。
分段加減速
-
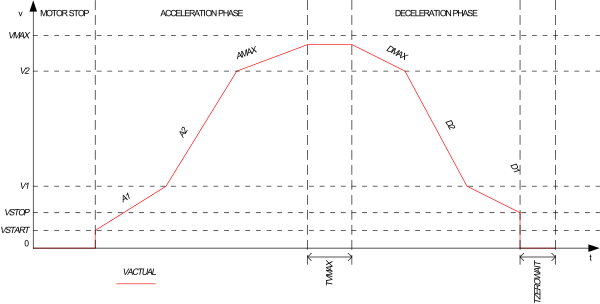
分段斜坡為速度剖面塑造帶來了彈性。
-
使速度曲線適應扭矩/速度曲線並限制急動。
-
縮短定位應用的達到目標的時間。
坡道計算器
TMCL-IDE 讓您可以透過評估套件、模組和 PANdrive 輕鬆調整和計算運動曲線。
聯繫我們
ADI 所有產品請洽【 安馳科技 】
安馳科技|ADI亞德諾半導體網站:https://anstekadi.com
安馳科技 LINE 官方帳號:https://lin.ee/5gcKNi7
安馳科技 Facebook 官方帳號:https://www.facebook.com/ANStek3528
安馳科技EDM訂閱 https://anstekadi.com/Home/EDM
申請樣品與技術支援:https://www.surveycake.com/s/dQ3Y2
與我聯絡:Marketing.anstek@macnica.com