人形機器人產業正快速發展,作為智慧機器人領域的代表性應用,它融合了機械製造、材料科學、通訊技術、感測技術、控制技術、仿生學與人工智慧等多項跨領域技術,象徵著機電整合、自動化與智慧化的最高水準。人形機器人不僅是智慧機器人中整合度最高的應用之一,同時也是技術挑戰性最高的領域。
本篇將全面介紹 ADI 在人形機器人領域的技術與解決方案,涵蓋即時控制、感測、通訊連接等多個層面:
-
運動控制:ADI Trinamic 產品 TMC9660 為一款智慧柵極驅動器 IC,內建伺服(FOC)控制器與降壓轉換器,客戶可在無需軟體程式設計的情況下,輕鬆實現進階電機與運動控制。
-
位置檢測:ADI 的新型單晶片多圈與角度位置感測器 ADMT4000,在斷電後仍能保留位置資訊,無需重新校正,簡化系統設計。
-
即時通訊:ADI 提供多種高速通訊介面選項,包括工業乙太網、GMSL 高速串列介面等,滿足機器人與外部設備之間的高速資料傳輸需求。
ADI 人形機器人領域的核心產品
如下圖(圖1)所示,ADI 在人形機器人應用中提供完整的解決方案,包含:
-
通訊連接:高速 GMSL、高速乙太網、USB、無線 SmartMesh 等
-
感測器:追蹤運動與方向的 IMU
-
視覺檢測:3D ToF 相機、毫米波雷達
-
振動檢測:振動感測器
-
關節運動控制:多圈位置編碼器與 TMC 系列控制器
-
安全與電源管理:安全加密晶片及電源管理晶片
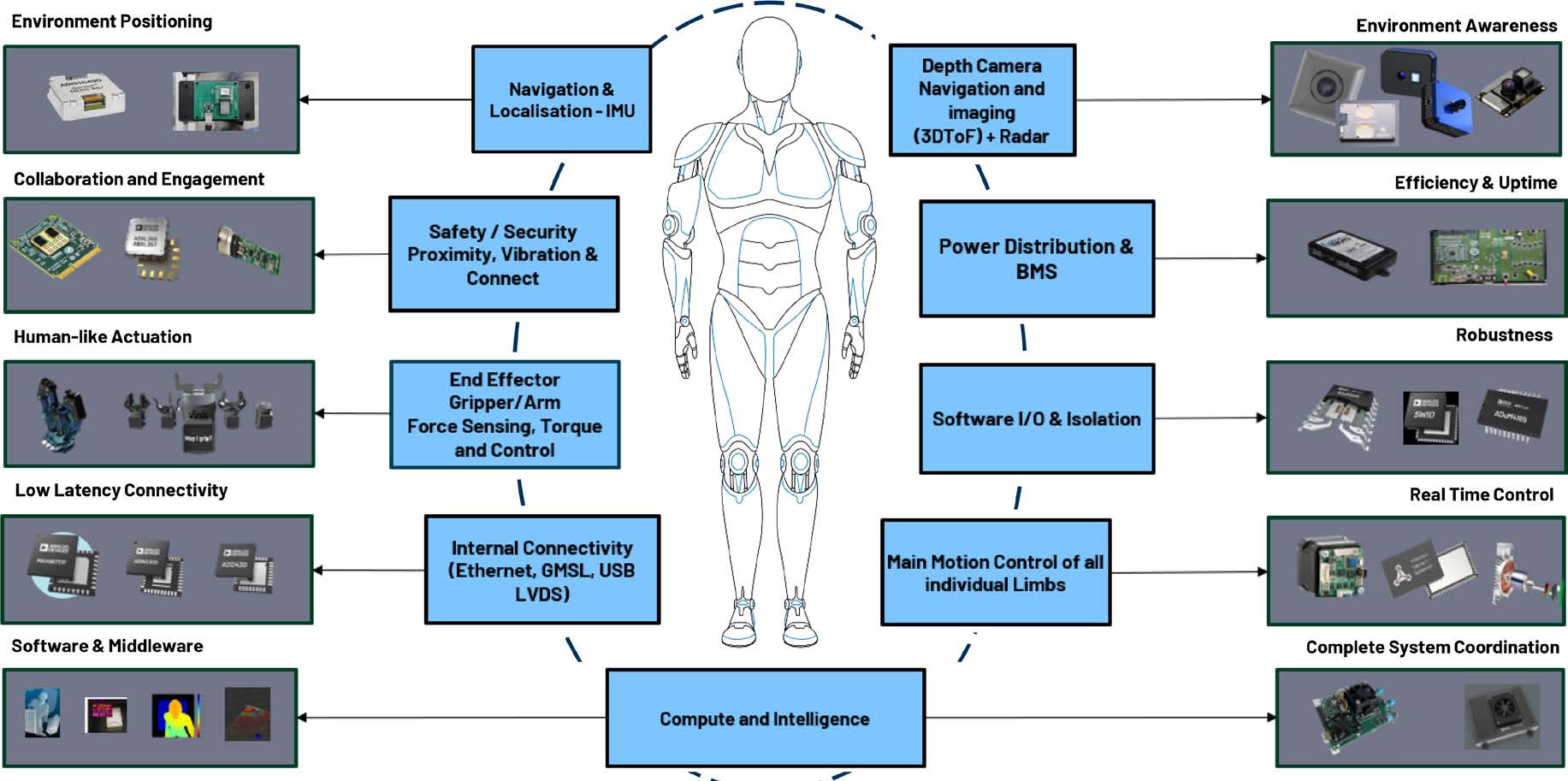 圖1. ADI人形機器人領域核心產品
圖1. ADI人形機器人領域核心產品
電機驅動與運動控制器
運動控制是人形機器人的核心硬體之一,作為關鍵執行元件,能驅動機器人完成各種運動。這些運動元件主要安裝在機器人關節位置,也就是連桿機構的連接點,將馬達的旋轉運動轉化為驅動連桿的動作。
驅動器(或致動器)通常由馬達減速器(傳動機構)、編碼器(位置感測)、控制板與控制軟體等組成。其中,TMC9660 是特別適用於人形機器人的電機驅動與運動控制 IC,具備智慧柵極驅動、內建 FOC 伺服控制器、降壓轉換器,以及快速類比電流感測(ADC 與 CSA)。其控制環路頻率最高可達 100kHz,能有效降低電流/扭矩紋波、提升控制頻寬,實現更高的動態反應能力。使用者無需撰寫程式即可輕鬆導入進階 FOC 控制演算法,極大化簡化應用開發。
TMC9660 支援包括 PMSM 永磁同步、BLDC 無刷直流、步進與有刷直流等多種馬達。內建 PI 位置控制器、8 點斜坡產生器,並支援多種包括A/B/N、霍爾感測器、SPI 介面在內編碼器。
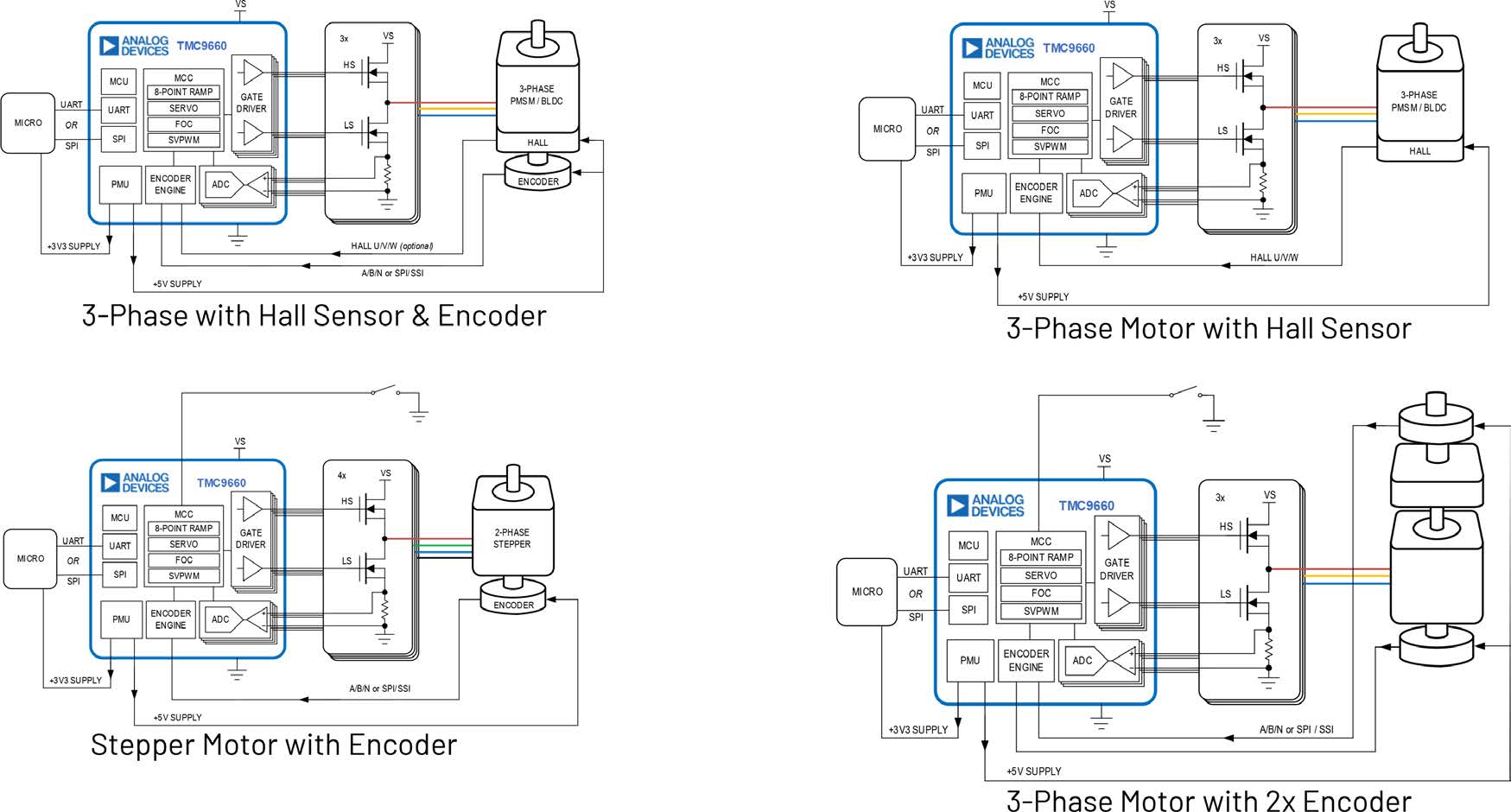
圖2. TMC9660子系統圖
TMC9660 功能總覽
-
70V智慧閘極驅動器(GDRV):高度集成的單片閘極驅動器和馬達控制器IC,最多可驅動 4 組半橋(NMOS),具12V 閘極驅動輸出電壓、支援最高 1A 拉電流與 2A 灌電流,並可程式化設定。
-
運動控制核心模組:FOC 控制頻率最高可達 100kHz,在上位機輸入速度和位置等參數則可輸出控制信號來直接控制電機,達到所需要的速度和位置,無需再完成FOC的一些演算法。內建 8 點斜坡產生器與即時諧波計算功能;馬達位置反饋介面支援A/B/N編碼器,U/V/W編碼器,及帶有SPI介面的霍爾編碼器。
-
量測單元:提供4 組高頻寬(15MHz)雙向電流檢測器(CSA),支援可調增益(5x/10x/20x/40x及直通),並內建 4 個 13 位元 ADC可用於同步採樣。
-
電源管理模組:支援最高 70V 輸入,5.8V/600mA 同步降壓輸出,並提供兩組外部 LDO,可設定為 2.5V/3.3V/5V。150mA輸出。
🔗 更多資訊:
-
評估軟體:TMCL-IDE
多圈位置感測器 – ADMT4000
ADMT4000 是一款無需電源、無接觸即可記錄圈數的多圈位置感測器,適用於工業與車用位置檢測應用,在人形機器人案例中,關節位置控制是其中一項主要應用。
傳統磁性感測器在系統面臨意外斷電,重新上電後傳統感測器容易遺失位置訊息。圖3示例了4種解決方案,其中前3種是傳統解決方案。 最左邊的是多圈檢測方案,利用齒輪減速器和單圈感測器進行檢測,最大缺點就是可能造成齒輪磨損及機械滯回。 另外,也有採用備用電池加單圈位置感測器和記憶體這樣的解決方案,最大缺點是尺寸稍微偏大,需要對電池進行維護和更換,同時還需要外帶一個記憶體。 也有廠商採取韋根導線Wiegand能量收集這樣的感測器與單圈感測器及FRAM晶元的結合使用,但是這種方案在圈數多了之後也有可能出現丟圈的現象。ADI 的解決方案可利用單晶片解決多圈的位置感測,在無需備用電池或齒輪機構的情況下,仍精準記錄圈數,具備高穩定性、高抗干擾能力與高精度,體積更小、設計更緊湊。
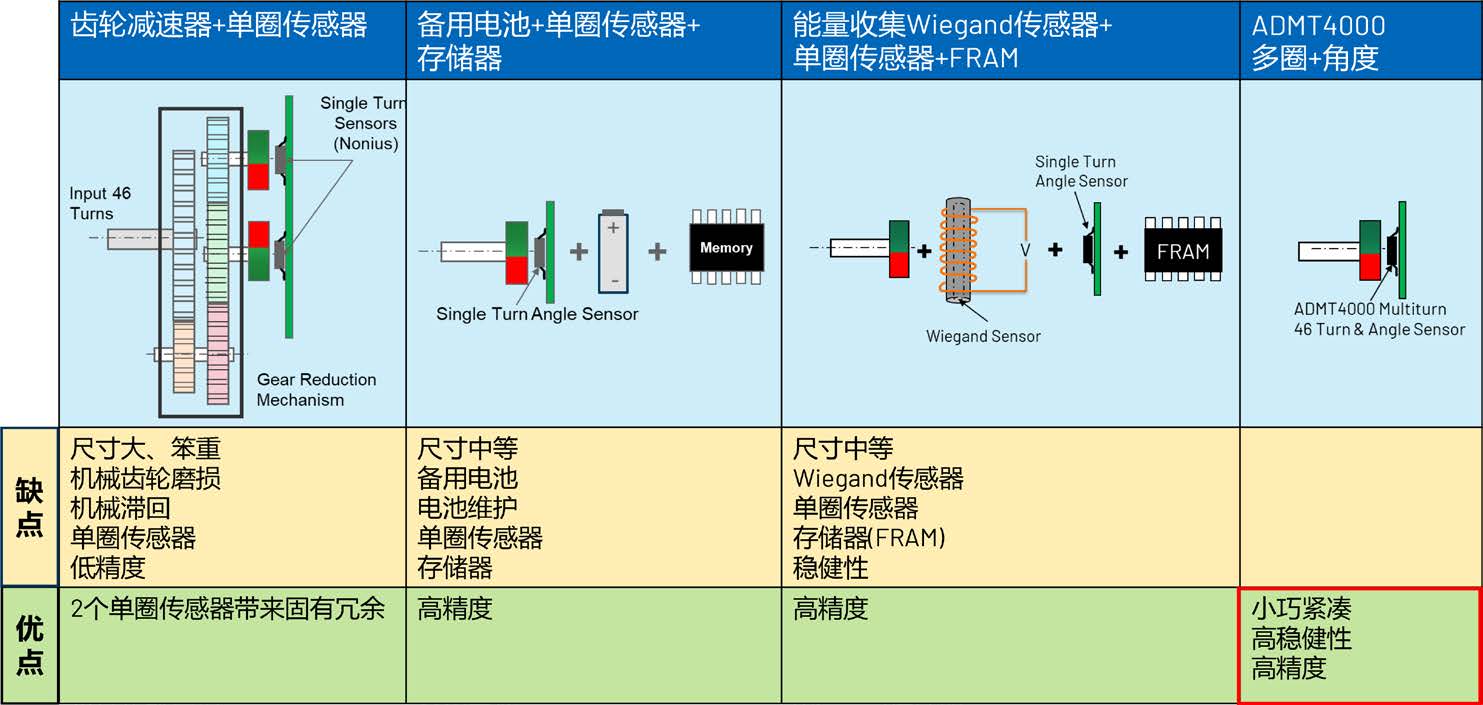
圖3. 多圈感測器解決方案(非接觸式)
主要應用場景
-
工業:人形機器人關節、線性執行器(如 XY 平台、旋轉軸)
-
傳統:起重機、吊車、升降平台、拉線編碼器
-
車用:安全帶、方向盤線控轉向
產品特性及參數
-
工業領域:支援 46 圈記錄
-
車規領域:支援 44 圈記錄
-
3.3V 供電,SPI 輸出介面
-
工作溫度範圍:-40°C~125°C
-
內建溫度感測器
-
提供 TSSOP 封裝,後續將推出 5mm x 5mm 小型封裝
磁遮罩設計建議
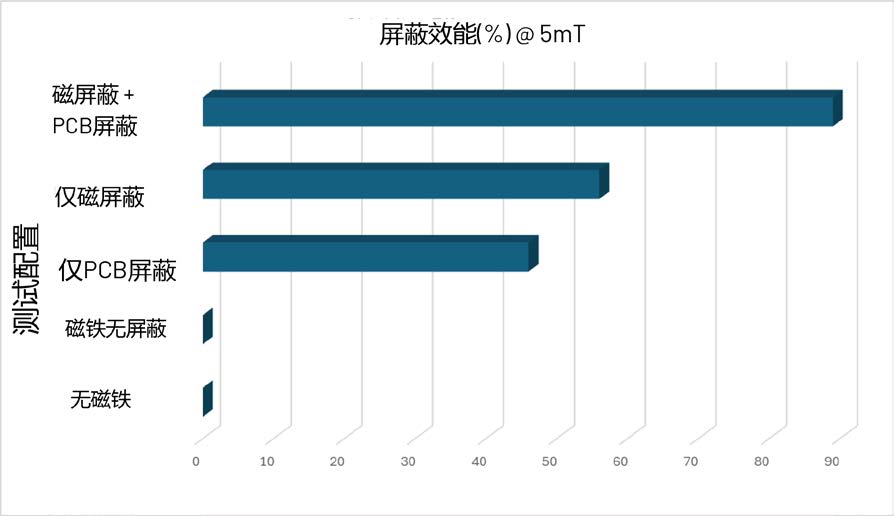
圖4. ADMT4000雜散場干擾測試
圖4主要介紹的是ADMT4000的雜散場干擾度測試,分別在帶遮罩和不帶遮罩的情況下進行測試。ADMT4000若在惡劣環境下使用時建議使用遮罩措施。 ADI開發了具有高雜散場抗擾度的磁鐵參考設計,如圖4所示。 除了提供磁鐵遮罩方案以及PCB的遮罩方案外,還提供設計圖紙。 內測發現, _磁鐵遮罩加PCB遮罩能夠提供更好的遮罩效果。
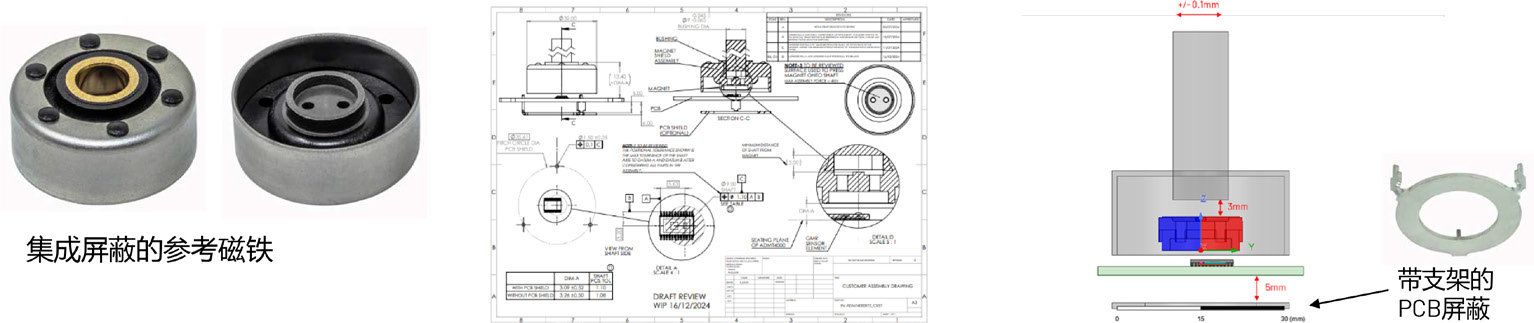
圖5. ADMT4000磁屏蔽參考設計
ADMT4000的磁復位
復位是使用這顆IC最常關心的一個問題。 目前,ADI提供了兩種複位方法:第一種方法是翻轉復位,也就是說需要順時針旋轉46圈以上進行復位; 第二種方法是通過強磁復位,一般建議在PCB板上放置一個線圈,激勵線圈產生大於55mT的強磁場便會使ADMT4000復位。 ADI的復位電路為設計者提供參考。
連接通信
人形機器人系統需要各種通信連接,比如頭部容納的多個感測器節點需要GMSL提供高速通信,關節和關節的連接需要乙太網/ EtherCAT連接,圖6表示不同的通信產品。
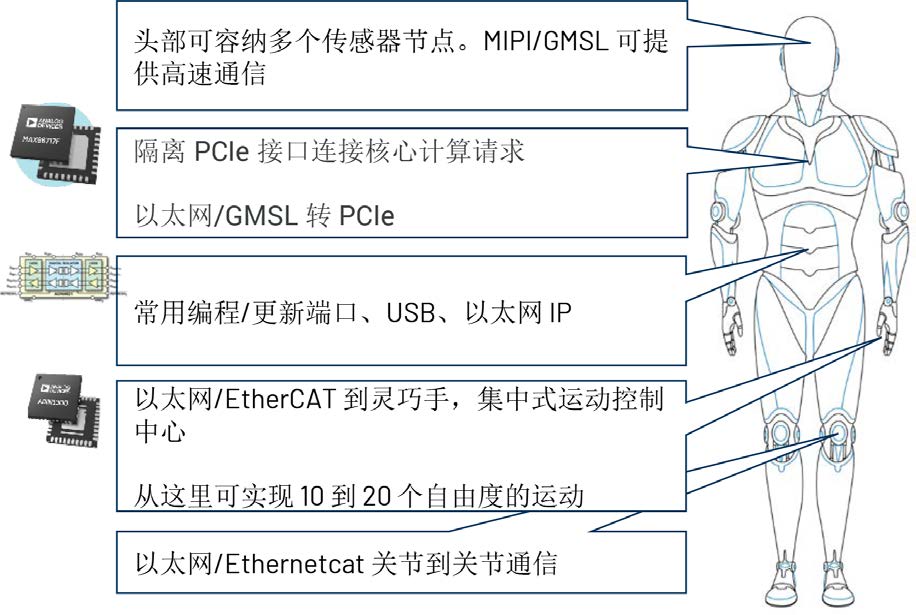
圖6. 人形機器人的通訊連接。
ADIN1300是一款低功耗、單埠千兆乙太網PHY收發器,具有低延遲和低功耗特性; GMSL (MAX96717/MAX96724)是一款高度可配置的高速SERDES(串行器和解串器)互連解決方案,可通過單線傳輸即時未壓縮視頻和感測器數據、控制數據和電源。
ADI的SPE方案,對於10BASE-T1L方案提供PHY ADIN1100,MACPHY ADIN1110, 2埠交換器ADIN2111; 對於10BASE-T1S方案提供MACPHY和E2B AD330x。
小結
人形機器人的大規模生產和應用逐漸成為現實,ADI提供了具有競爭力的方案,包括集成FOC演算法的電機控制方案,精準感知的磁編碼器關節方案和低延遲、高可靠的通信網路連接產品。 ADI 在感知、驅動和通信連接等維度進行產品賦能。
聯繫我們
安馳科技 LINE 官方帳號👉https://lin.ee/5gcKNi7
安馳科技 Facebook 官方帳號👉https://www.facebook.com/ANStek3528
申請樣品、報價及技術支援👉marketing.anstek@macnica.com