摘要
位置感測器和編碼器的應用無所不在。但現有解決方案提供的要麼是單圈或360°位置資訊,要麼需要和其他感測器配合,造成系統體積笨重,有不易維修等問題。ADI 發佈的 ADMT4000 正好解決了業界痛點。
ADMT4000 是 ADI 公司領先發布的單晶片多圈位置感測器,絕對量測範圍為46圈,在整個量測範圍內達到0.25度的精準度。藉助這種新的多圈技術,省去與單圈感測器結合使用的備用電池或機械齒輪,也可以免去線性致動器中的線性感測器。此外,對於未採用傳統笨重機械多圈編碼器的系統,這種感測器無需在開機時重新歸零或重新校正。
本文從現有方案缺點出發,介紹新型多圈技術及 ADMT4000 產品運作原理,分析如何將這款感測器融入到編碼器或致動器系統的設計中,並提供解決辦法以確保這款感測器在惡劣環境下保持穩健可靠的運作。
ADMT4000 旨在協助客戶簡化編碼器或致動器的設計,減小尺寸和重量,同時降低整體解決方案的成本。
角度感測器類型
現今市場上的角度感測器種類較多,如圖1所示,有磁式、光學式、電感式、旋變器式等感測器。霍爾感測器基於磁效應,XMR 系列感測器有 AMR、GMR 和 TMR 感測器,它們通常對磁場方向的變化很敏感。但遺憾的是,所有這些感測器的絕對量測範圍都只有單圈(即360度),AMR 感測器是個例外,它的訊號是以180度為週期進行重複,絕對量測範圍是半圈(即180度)。
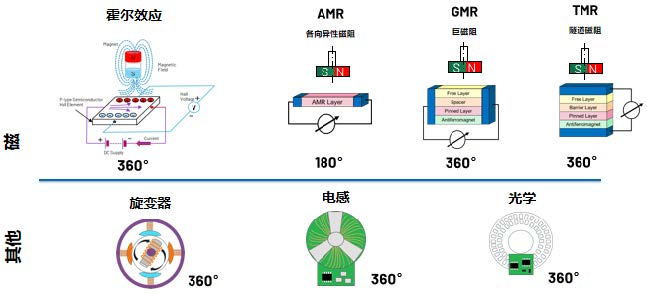
圖1. 傳統角度傳感器(基本為360度)
若客戶想要進行超過一圈的絕對量測,非接觸式是目前可行的實現方法。圖2範例四種解決方案,前三種是傳統解決方案,第四種則是受市場歡迎、簡化過後的新解決方案-即 ADMT4000 單晶片多圈角度偵測 IC ,我們這裡做出的比較如下:
- 齒輪減速機構:與單圈感測器結合使用,以縮小整圈計數範圍。圖2最左邊展示的是四到六圈的範例。根據齒輪的數量,輸出端可能只需要一個感測器,但前提是要能把它缩小到一圈,也可以選擇使用兩個感測器和更少的齒輪機構,取決於圈數甚至可能需要更多感測器。缺點是太過笨重和龐大,運轉產生的磨損可能導致機械遲滯,且精準度和解析度隨之降低。輸出只有一圈使得精度受到影響,解析度也隨之大大降低。 優點是存在固有冗餘,前提是使用兩個單圈感測器和Nonius原理。
- 備用電池與記憶體:將備用電池、記憶體與單圈感測器結合使用。優點是採樣準確,可以保持相當高的整體精度,但缺點是體積較大,以及電池維護造成停機維修的高昂成本。
- 能量採集模組 (Weigand 感測器):作為備用電池的替代方案,需與單圈感測器及 FRAM 晶片結合使用,但在穩定度方面可能令人擔憂。
- ADMT4000:如圖2最右邊所示,ADMT4000單晶片多圈角度偵測 IC,小巧、緊湊,具有出色的穩定度和精準度,消除了上述其他系統的所有缺點。
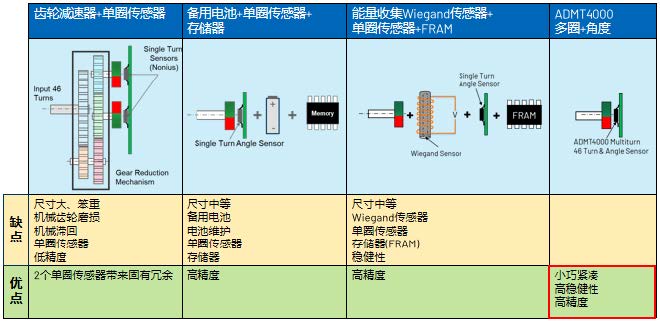
圖2. 非接觸式多圈感測器解決方案
以上所述,有助於我們對ADMT4000如何簡化編碼器或執行器的設計,有直觀的瞭解。
ADMT4000 的市場應用
ADMT4000 為許多工業應用帶來顯著價值,包括包括線性執行器、旋轉執行器、機器人/協作機器人/人形機器人、起重機/吊車/升降機、汽車安全帶、汽車線控轉向等。
- 線性執行器:線性執行器中通常有個馬達用來驅動螺桿,進而驅動整個模組或X-Y平台來做直線運動。通常情況下,現行系統中需要線性位置感測器或線性感測器來跟蹤模組或X-Y平台的運動,ADMT4000能夠間接測量這種運動。可透過螺桿的螺距和感測器的角度與多方向資訊,間接精確計算出線性位置,省去線性感測器,簡化設計並降低系統總成本。線性執行器在工業領域中可應用在龍門加工機、通用加工機、貼片設備等。
- 旋轉執行器:可大幅簡化執行器,同時作為馬達換向感測器及絕對輸出角度感測器。系統在重新通電時可立即知道絕對位置資訊,無需重新歸零或重新校正。ADMT4000 則是這個應用的很好範例,可以大幅簡化執行器,既可以用作具有360度功能的馬達換相感測器,也可以用作絕對輸出角度感測器,因為始終可以知道圈數是多少,比如斷電時如果旋轉了23圈,就可以知道輸出側可能處於180度,這樣就能獲取這些資訊而無需重新歸位或重新校準系統。
- 機器人/協作型機器人/人型機器人:縮小了致動器尺寸,讓終端使用者能夠建構更緊湊的系統,並消除了開機時重新歸零和重新校正的麻煩。因此,ADMT4000不僅縮小了執行器尺寸,讓終端用戶能夠構建更緊湊的系統,而且消除了重新歸位和重新校準整個系統的麻煩。 總體而言,它為機器人、協作機器人和人形機器人製造商帶來顯著的好處。
- 起重機、吊車、升降機:無需備用電池或傳動裝置,就能知道通電時系統的絕對位置資訊,也不需要在通電時重新復歸或校準,開機時即可知道絕對位置資訊,減少了整體停機時間。
- 汽車線控轉向:線控轉向系統中,方向盤和車軸間無法依賴轉向角度感測器獲得角度資訊,因此必須在車軸處放置一個測量系統,可透過沿轉向齒條放置線性感測器或位置感測器來實現,也可在馬達軸的末端安裝帶單圈感測器的齒輪來實現,或放入備用電池與單圈感測器配合使用來保存資訊。
ADMT4000如上面所述,可大幅簡化系統,它可以放置在馬達軸末端,在馬達換向的同時提供轉向角度資訊和多圈資訊,開機時就能精確知道車輪的角度,不需加裝額外的感測器。
ADMT4000產品概述(Datasheet下載👉連結)
ADMT4000這款感測器由GMR多圈感測器、高精度AMR角度感測器和信號調理ASIC組成,其中GMR上帶有象限感測器,ASIC接收來自多圈感測器、象限感測器和AMR角度感測器的輸入,並對這些信號進行必要的信號處理,如片內校准和諧波校准校正,檢查系統中的機械誤差等。 此外,磁體本身的任何問題都可以通過重新校準消除。 通過校准技術,實現了±0.25°的精度,感測器是46 圈,所以它完整的絕對測量範圍是46圈。
使用此款感測器需要16~31mT的磁場視窗內操作,若沒有足夠的磁能,或磁場強度低於16mT,則會面臨磁能不足的風險,無法將磁疇移出疇壁發生器並穿過螺旋。 如果磁場強度超過31mT,尤其是顯著超過31mT的話,則會有額外磁疇加入螺旋中以致產生錯誤計數信息的風險,或者非常強的磁場會導致螺旋完全複位。
圖3表示ADMT4000器件剖面圖及簡易設計框圖,帶有SPI介面, 工作溫度範圍是-40°~125°,採用24引腳TSSOP封裝。 目前正在開展汽車應用認證方面的工作,完成認證後將會發佈車用版本。

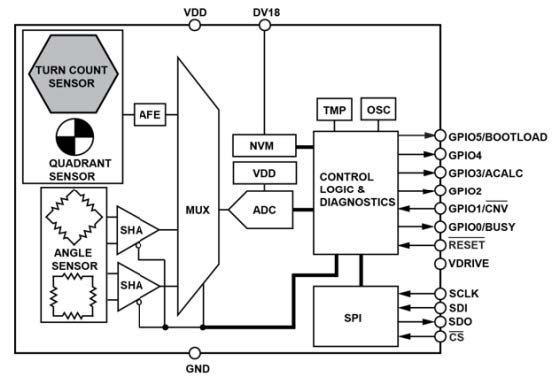
圖3. ADMT4000產品及方塊圖範例
ADMT4000雖然在雜散場中表現穩健,但和目前市場上的任何磁感測器一樣如果環境惡劣且存在強雜散場則可能受損,因此建議使用磁遮罩。 ADI開發了磁性參考設計,採用的是自帶遮罩的磁體,同時還開發了PCB遮罩,位於PCB上與感測器相對的一側,圖4給出範例。
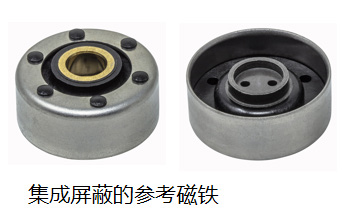
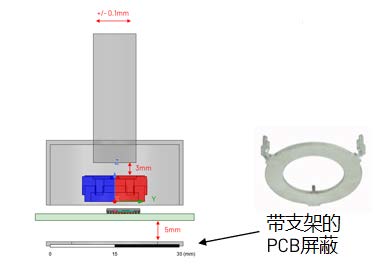
圖4. 集成遮罩的參考磁鐵
在存在雜散場的情況下進行抗擾度測試,圖4示範5mm雜散場下磁性能測試時的遮罩效能。 若只把PCB遮罩放在系統上,移除雜散場的效率約為45%; 若單獨添加磁遮罩而沒有PCB遮罩的話,效率為55%左右; 若同時添加磁遮罩和PCB遮罩兩種遮罩,那麼移除雜散場的效率接近90%。
ADI也會向客戶提供設計圖,提供可接受的公差,包括終端應用容許的軸向和徑向公差,這些工具可以説明客戶設計穩健的磁體。
生產線應用中若部署ADMT4000,建議對感測器進行磁複位, 請注意,此複位是一次性操作。 如果感測器在運輸或組裝搬運過程中損壞,建議對其進行複位。 通常情況下,系統初次啟動時為了讓整體系統校準到位,必須先對感測器進行複位。
感測器複位(Reset)操作
有兩種方法可以對感測器進行複位:方法一是將它超量旋轉完成複位,如果順時針轉動46圈以上,螺旋中的任何錯誤都會被消除,這將確保感測器複位到46圈。 若將感測器轉動100次,它會停留在46圈,即最大圈數。
第二種方法是施加超55mT的磁場,可以將感測器暴露在外部磁鐵下,甚至可以讓系統磁體非常靠近感測器,這種方法具體要取決於設計,但這樣做足以完成複位。 另外一種措施是在PCB 上放置一個小線圈,如圖5顯示。
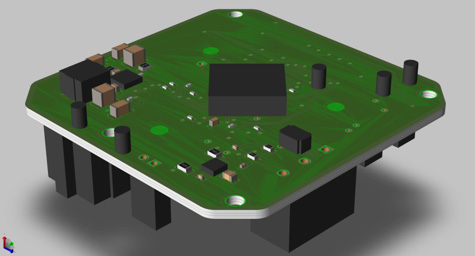
圖5.多圈GMR感測器磁複位技術
驅動電路可以用短脈衝通電來對感測器進行複位,實際的驅動電路不必位於系統上,可以是外部電路。 複位操作可以在最終組裝點通過這個外部驅動電路進行。
圖6.ADMT4000開發板EVAL-ADMT4000
總結
ADMT4000 是 ADI首款單晶片多圈絕對位置感測器,可顯著降低系統設計的複雜度與成本,並實現更小尺寸、更輕重量與更高整合度的解決方案。它可完全取代傳統的笨重機械式位置量測方案,以及需搭配單圈感測器使用的線性感測器、機械傳動裝置或備援電池。藉此可大幅縮短系統校正時間,並消除開機後重新歸零的需求,進一步降低系統維護成本。ADMT4000 的設計使得即使缺乏磁性設計經驗的工程師,也能輕鬆導入應用,為次世代的智慧馬達控制、機器人、工業自動化與車用位置偵測開啟更多可能性。
聯繫我們
安馳科技 LINE 官方帳號👉https://lin.ee/5gcKNi7
安馳科技 Facebook 官方帳號👉https://www.facebook.com/ANStek3528
申請樣品、報價及技術支援👉marketing.anstek@macnica.com