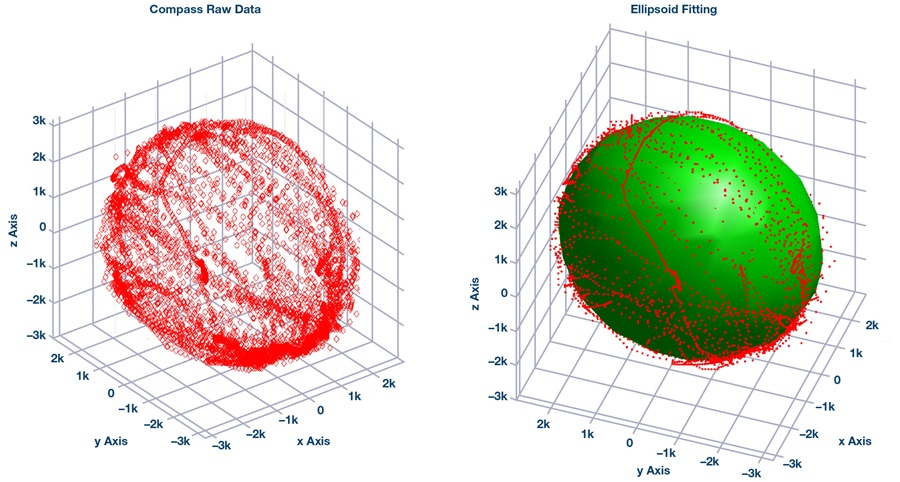
本文旨在介紹我們使用ADI公司的慣性測量單元(IMU)感測器ADIS16470和PNI的地磁感測器RM3100建構的捷聯慣性導航系統(SINS)。實現了基於磁力、角速率和重力(MARG)的SINS的一些基本過程,包括電磁羅盤(地磁感測器)校準、使用擴展卡爾曼濾波器(EKF)的姿態和航向參考系統(AHRS)和航跡跟踪。
本文旨在介紹我們使用ADI公司的慣性測量單元(IMU)感測器ADIS16470和PNI的地磁感測器RM3100建構的捷聯慣性導航系統(SINS)。實現了基於磁力、角速率和重力(MARG)的SINS的一些基本過程,包括電磁羅盤(地磁感測器)校準、使用擴展卡爾曼濾波器(EKF)的姿態和航向參考系統(AHRS)和航跡跟踪。